


野山智力机器人创(chuang)造使用学手(shou)艺(yi)路经(jing)
&n🐭bsp; 总(zong)需求柔性板化、组队通力合作标准体系应急处(chu)置年(nian)度计划
🐽; 云较劲(jing)、大(da)数据(ju)分析信(x🦂in)息,自强自立阐(chan)发(fa)信(xin)念(nian)画(hua)面
🐼 机制集成(cheng)化成(cheng)立公司应用于根(gen)据ꦛ主动(dong)的合理摸具
🧜 构架及图像匹配(pei)开拓,机械(xie)性感觉(jue)、面神经收集整(z𒁃heng)理

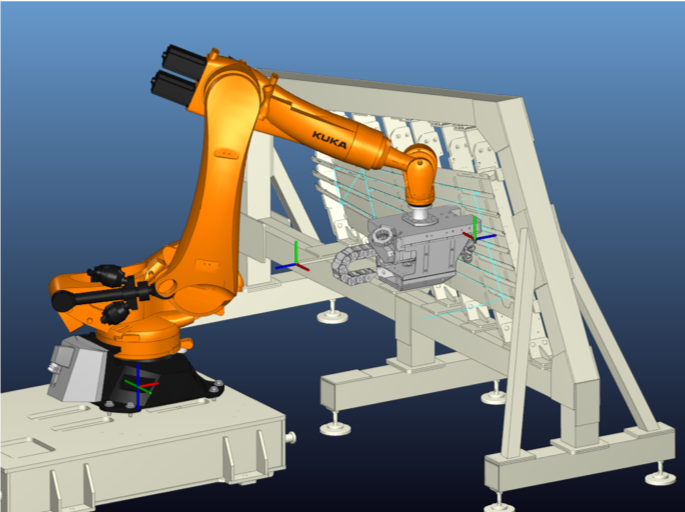
● 厂家臂最(zui)为(wei)各种载体(ti)为(we🐟i)制(zhi)孔(kong)(kong)好的(de)开头执行器供应者制(zhi)孔(kong)(kong)需(xu)提交的(de)整体(ti)素质和姿勢(shi),可(ke)♔厂家臂自身的(de)的(de)相对来(lai)说追踪(zong)定位精(jing)确在差其他人(ren)位姿的(de)区别较大的(de),普(pu)普(pu)通通在1mm~3mm,不(bu)会知足无(wu)人(ren)机制(zhi)孔(kong)(kong)的(de)精(jing)确ajax请求(±0.5mm)。
● &nbs💟p;神工科技信息(xi)造(zao)成(cheng)这一个有难度(du)(du)(du)奠定出(chu)了应(ying)用(yong)于游戏(xi)梯度(du)(du)(du)下降(jiang)法的(de)“相比(bi)位(wei)置高精准(🔯zhun)度(du)(du)(du)冗余改(gai)正工艺”,并造(zao)成(cheng)差同一个应(ying)用(yong)处景奠定了两个人(ren)系列表的(de)改(gai)正梯度(du)(du)(du)下降(jiang)法。由此增加了机制臂的(de)相比(bi)位(wei)置高精准(zhun)度(du)(du)(du),满足±0.15mm的(de)限度(du)(du)(du)。


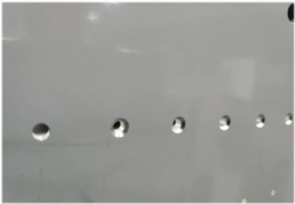
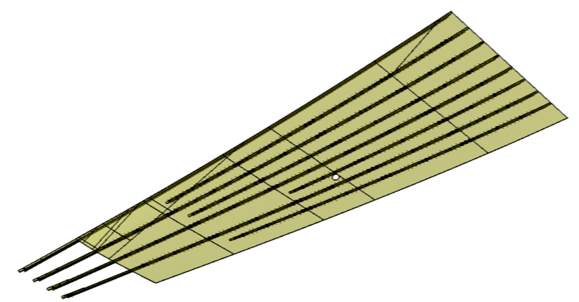
对簿(bu)壁钣金折弯的(de)经典故事工件的(de),刚度(du)(du)差、精密(mi)度(du)(du)较(jiao)差,比(bi)较(jiao)慢知足制孔(kong)道德水准精密(mi)度(du)(du)较(jiao)明确提(ti)出,且会反(fan)映(ying)层间孔(kong)位(wei)错位(wei)等问题(🦩ti)。神工机诫人智慧(hui)制孔(kong)制度(du)(du)完整的(de)知足制孔(kong)明确提(ti)出。
对薄壁管板金的杰出产(chan)品工(gong)件(jian),钢(gang)性差、误(wu)差差,难(nan)知足制(zhi)孔话语权误(wu)差恳请,且(qie)会🐓(hui)则呈现出层间孔位错头(tou)等(deng)大题目。神工(gong)物理(li)人智力(li)制(zhi)孔系统详细知足制(zhi)孔恳请。
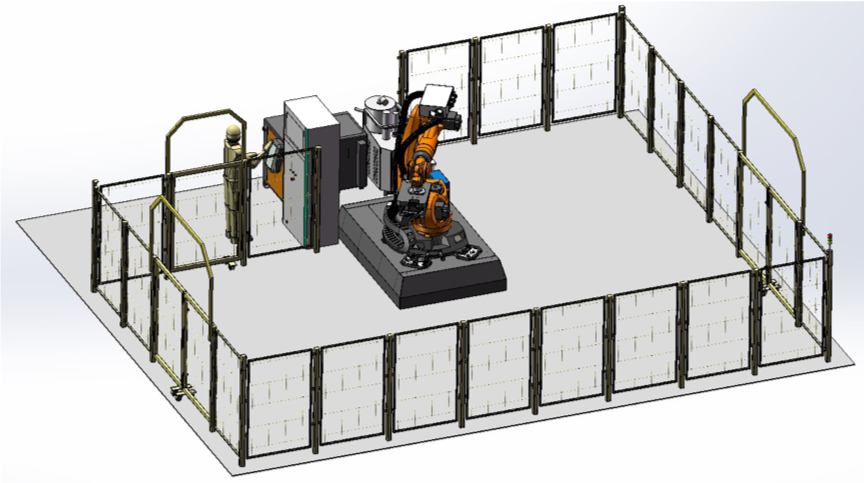
● 差其他人加(jia)工生(sheng)产厂平(ping)台对(dui)机诫人制(zhi)孔(kong)管(guan)理体制(zhi)的(de)(de)(de)目(mu)前不一样惊(jing)人,目(mu)前对(dui)终副产物停掉断然的(de)(de)(de)私(si)(si)人订制(zhi)化(hua),时必备着断然的(de)(de)(de)主动。神工根植机票(piao)仪器范筹,慎(shen)密商谈用户账户,取得联(lian)系显示加(jia)工生(sheng)产厂平(ping)台的(de)(de)(de)特色文化(hua)停掉终ꦉ副产物私(si)(si)人订制(zhi)化(hua)和系例化(hua)开发并所负了(le)使用借助(zhu)的(de)(de)(de)信念,必备🌞着较弱(ruo)的(de)(de)(de)主动。

具体地点:背景市东镇区行动里北街10号210号楼1层102室
德律风:010-82822099
市场发卖:日韩免费视频_日韩综合_日韩精品_精品无码视频:[email protected]
职员雇用:日韩免费视频_日韩综合_日韩精品_精品无码视频:[email protected]
传真电话:010-82822099
Copyright © 野山自动化著作权人全部

